
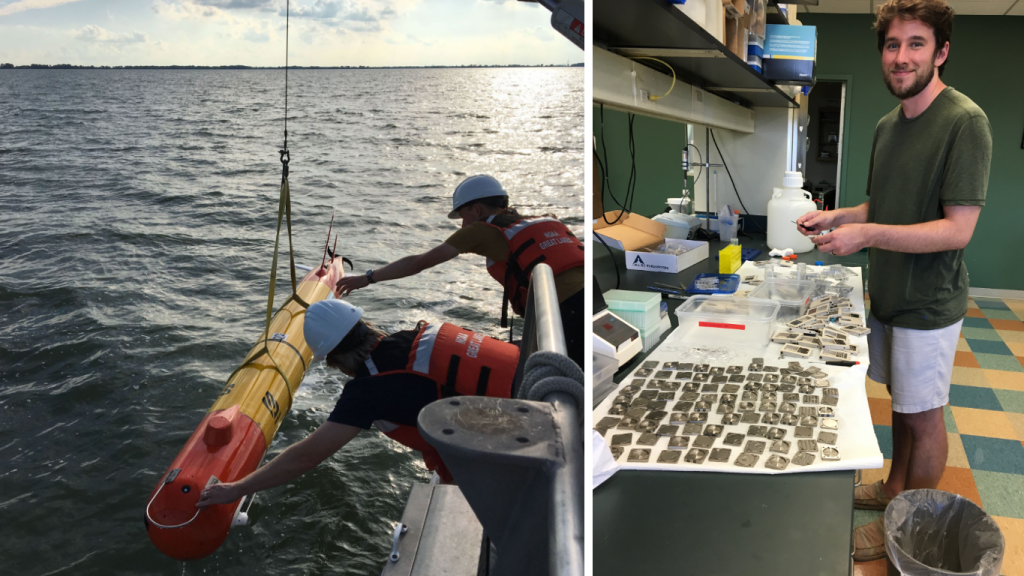
Newly published research from the NOAA Great Lakes Environmental Research Laboratory (GLERL), the Cooperative Institute for Great Lakes Research (CIGLR), and partners reveals that using underwater robots could significantly advance scientists’ ability to study the harmful algal blooms (HABs) that appear in the Great Lakes and oceans every summer. You may remember reading about NOAA’s collaborative fieldwork in 2019 that used these robots to detect toxins in Lake Erie’s harmful algal bloom. Three years later, the findings from this pioneering research come bearing good news!

What are HABs, and how do we study them?
HABs occur when colonies of algae grow out of control and produce toxic or harmful effects on people, fish, shellfish, marine mammals and birds. Western Lake Erie in particular has been plagued by intensified HABs over the past decade. These blooms consist of cyanobacteria, or blue-green algae, which are capable of producing toxins that endanger human and animal health, compromise drinking water supplies, foul coastlines, and impact communities and businesses that depend on the lake.

The underwater robot used in this research project is known as a long-range autonomous underwater vehicle, or LRAUV. As the name suggests, the LRAUV is built to travel long distances beneath the water’s surface, collecting data for an extended period of time. LRAUVs are useful research tools, as they can collect high-quality data more efficiently and cost-effectively than scientists taking samples from a ship or along the shore. They can be deployed day and night in all weather conditions, and can provide more detailed information to researchers and drinking water managers than other monitoring methods.
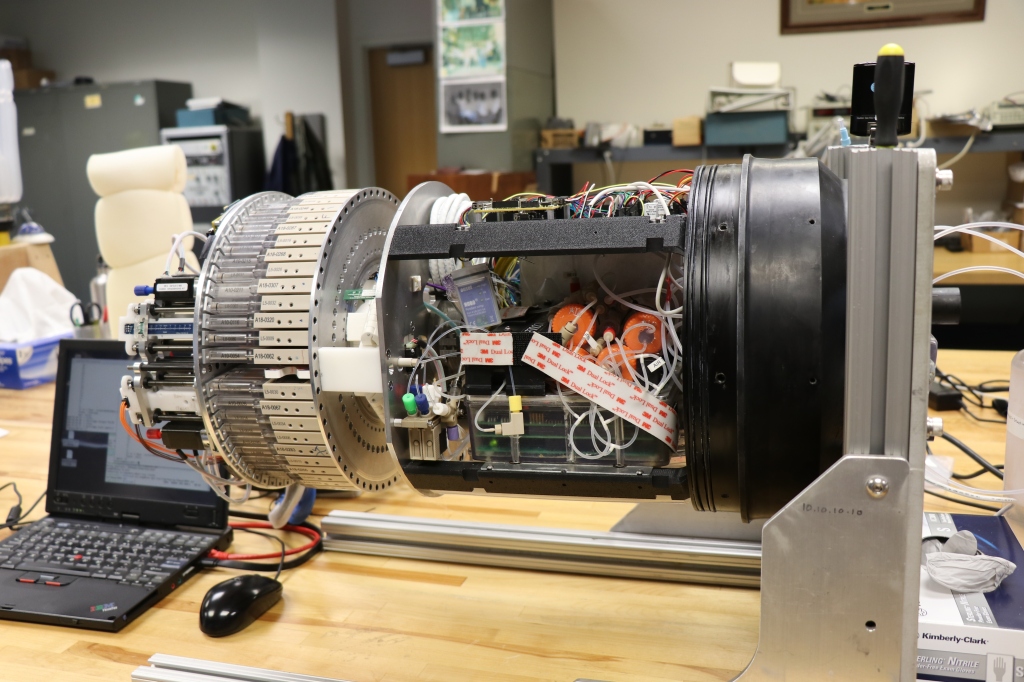
For this project, NOAA and CIGLR teamed up with the Monterey Bay Aquarium Research Institute and university partners to equip an LRAUV with a 3rd Generation (3G) Environmental Sample Processor (ESP) — a mobile version of what has previously been known as NOAA’s “lab in a can.” The 3G ESP’s job is to measure microcystin, a potent liver toxin produced by the cyanobacteria that cause harmful algal blooms in the Great Lakes. In just a few hours, the 3G ESP can collect and analyze water samples from the bloom with the same methods that scientists use to analyze samples back at the lab. It does this with the use of ‘omics, a collective suite of technologies used to analyze biological molecules such as DNA, RNA, proteins, or metabolites. These technologies can be used to identify the algal species that produce HABs, understand their behavior, and predict shifts in their population structure.

Did this robot step up to the challenge?
Before widely adopting the use of the LRAUV-3G ESP to study Lake Erie HABs, scientists had to ensure that the data these instruments collect is accurate and reliable. A main goal of the new publication was to assess how dependable the LRAUV-3G ESP’s data is compared to data that was collected and analyzed by humans.
The authors used a variety of parameters to assess the vehicle’s performance of ‘omics tests on samples it collected from the HAB. They ultimately found that the LRAUV-3G ESP successfully performed flexible, autonomous sampling across a wide range of HAB conditions, and the results indicated equivalency between autonomous and manual methods. In fact, no significant differences were found between LRAUV-3G ESP and manual sample collection and handling methods in the 12 parameters tested. In other words, this robot passed the test!
One of the most exciting aspects of this research is that it shows that scientists can use an autonomous sampling platform to replicate traditional ship-based sampling, and they can do so in a particularly challenging environment (Lake Erie’s shallow western basin) where HABs are a serious health concern. Using this instrument in Lake Erie’s shallow waters presented another challenge for the scientists involved. In response to the lake’s challenges, researchers worked on the LRAUV’s buoyancy to ensure that the instrument didn’t drag across the ground. With this technology – sampling DNA and measuring toxins on an autonomous platform – NOAA and partners may be able to provide an early warning system for HABs in the future.
Partners on this research came from far and wide to conduct this important research:
- National Oceanic and Atmospheric Administration (NOAA)
- NOAA Atlantic Oceanographic and Meteorological Laboratory (AOML), Ocean Chemistry and Ecosystems Division
- NOAA Great Lakes Environmental Research Laboratory
- NOAA National Centers for Coastal Ocean Science (NCCOS)
- NOAA Southwest Fisheries Science Center
- Cooperative Institute for Great Lakes Research (CIGLR), University of Michigan
- Northern Gulf Institute, Mississippi State University
- Monterey Bay Aquarium Research Institute (MBARI)
- Department of Earth and Environmental Sciences, University of Michigan
Explore more photos of this research on NOAA GLERL’s Flickr page.



